日用而不知
来看一个生活中的例子。比如说,有五把尺子:
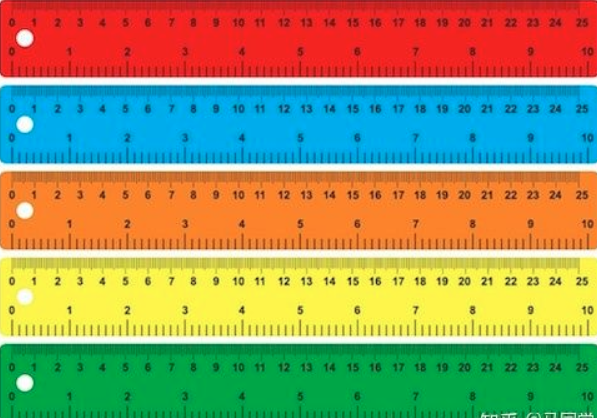
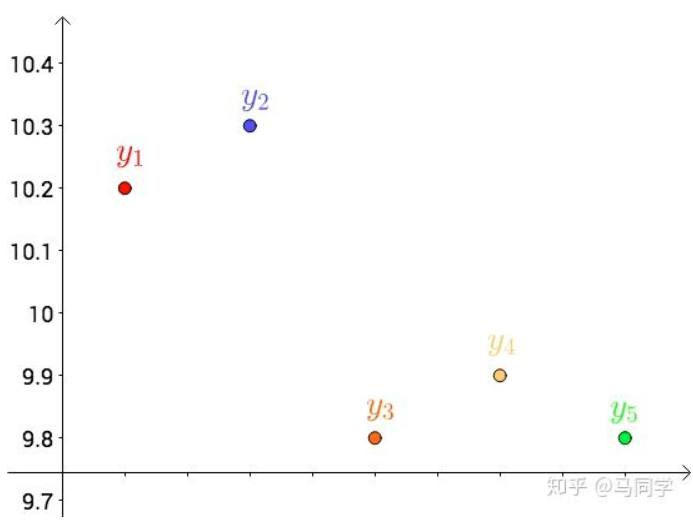
用它们来分别测量一线段的长度,得到的数值分别为(颜色指不同的尺子):

之所以出现不同的值可能因为:
- 不同厂家的尺子的生产精度不同
- 尺子材质不同,热胀冷缩不一样
- 测量的时候心情起伏不定
- ……
总之就是有误差,这种情况下,一般取平均值来作为线段的长度:
总之就是有误差,这种情况下,一般取平均值来作为线段的长度:
\[\begin{equation}\bar{x}=\frac{10.2+10.3+9.8+9.9+9.8}{5}=10\end{equation}\]日常中就是这么使用的。可是作为很事’er的数学爱好者,自然要想下:
- 这样做有道理吗?
- 用调和平均数行不行?
- 用中位数行不行?
- 用几何平均数行不行?
最小二乘法
换一种思路来思考刚才的问题。
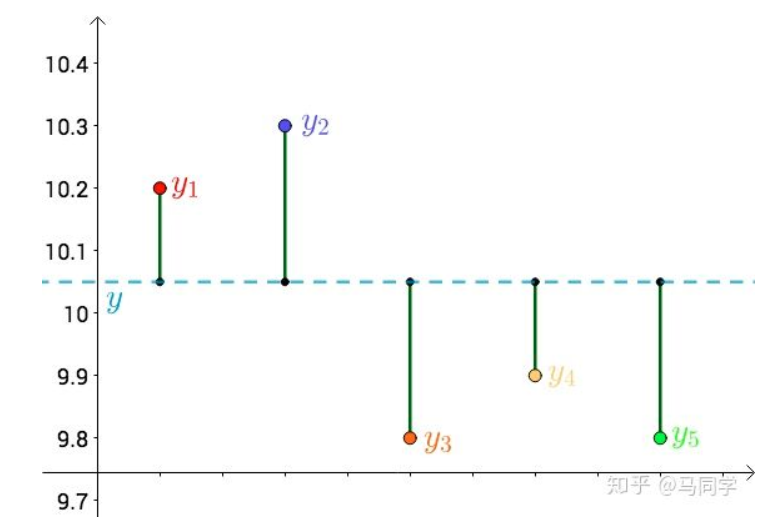
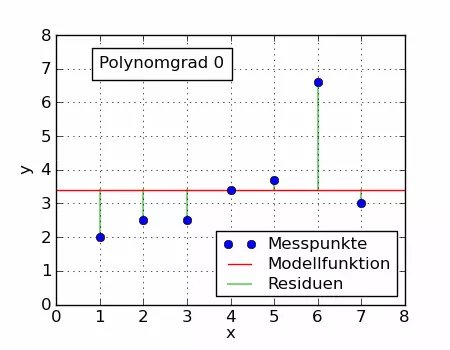
首先,把测试得到的值画在笛卡尔坐标系中,分别记作 $y_i$
其次,把要猜测的线段长度的真实值用平行于横轴的直线来表示(因为是猜测的,所以用虚线来画),记作 $y$
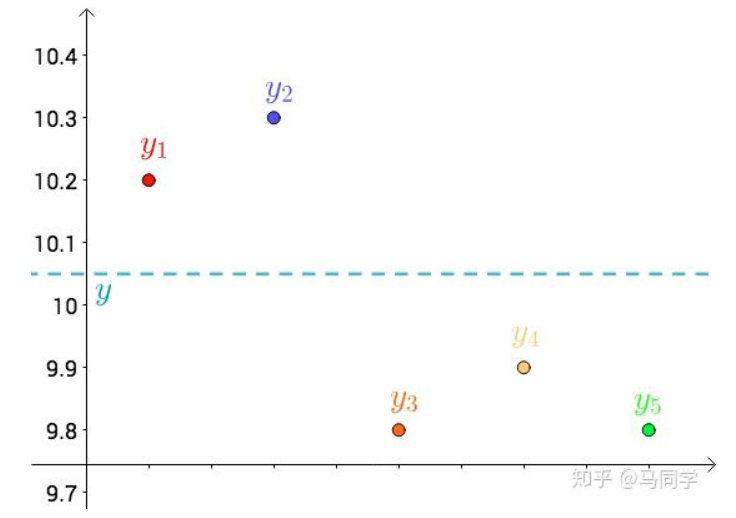
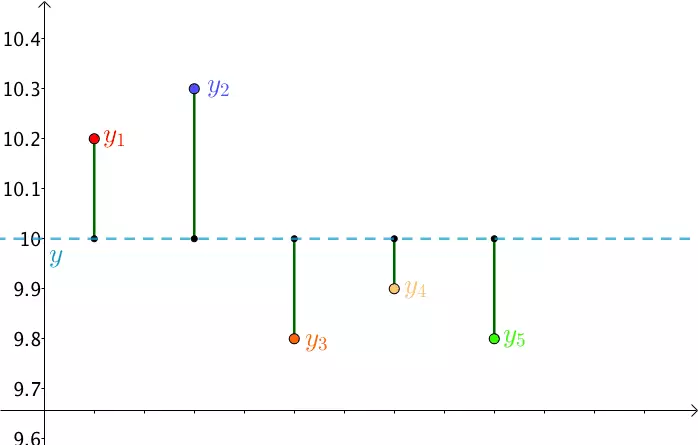
每个点都向 $y$ 做垂线,垂线的长度就是 $|y-y_{i}|$,也可以理解为测量值和真实值之间的误差:
因为误差是长度,还要取绝对值,计算起来麻烦,就干脆用平方来代表误差:
\[\begin{equation}\left|y-y_{i}\right| \rightarrow\left(y-y_{i}\right)^{2}\end{equation}\]误差的平方和就是(\(\epsilon\) 代表误差):
\[\begin{equation}S_{\epsilon^{2}}=\sum\left(y-y_{i}\right)^{2}\end{equation}\]因为 $y$ 是猜测的,所以可以不断变换:
自然,误差的平方和\(S_{\epsilon^{2}}\) 在不断变化的。
法国数学家,阿德里安-马里·勒让德, 提出让总的误差的平方最小的 $y$ 就是真值,这是基于,如果误差是随机的,应该围绕真值上下波动
勒让德的想法变成代数式就是:
\[\begin{equation}S_{\epsilon^{2}}=\sum\left(y-y_{i}\right)^{2} \text { 最小 } \Longrightarrow \text { 真值 } y\end{equation}\]这是一个二次函数,对其求导,导数为0的时候取得最小值:
\[\begin{equation}\begin{aligned} \frac{d}{d y} S_{\epsilon^{2}} &=\frac{d}{d y} \sum\left(y-y_{i}\right)^{2}=2 \sum\left(y-y_{i}\right) \\ &=2\left(\left(y-y_{1}\right)+\left(y-y_{2}\right)+\left(y-y_{3}\right)+\left(y-y_{4}\right)+\left(y-y_{5}\right)\right)=0 \end{aligned}\end{equation}\]进而:
\[\begin{equation}5 y=y_{1}+y_{2}+y_{3}+y_{4}+y_{5} \Longrightarrow y=\frac{y_{1}+y_{2}+y_{3}+y_{4}+y_{5}}{5}\end{equation}\]正好是算术平均数。
原来算术平均数可以让误差最小啊,这下看来选用它显得讲道理了。
以下这种方法:
\[\begin{equation}S_{\epsilon^{2}}=\sum\left(y-y_{i}\right)^{2} \text { 最小 } \Longrightarrow \text { 真值 } y\end{equation}\]就是最小二乘法,所谓“二乘”就是平方的意思,台湾直接翻译为最小平方法。
推广
算术平均数只是最小二乘法的特例,适用范围比较狭窄。而最小二乘法用途就广泛。
比如温度与冰淇淋的销量:
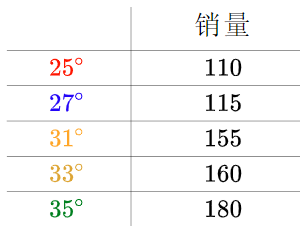
看上去像是某种线性关系:
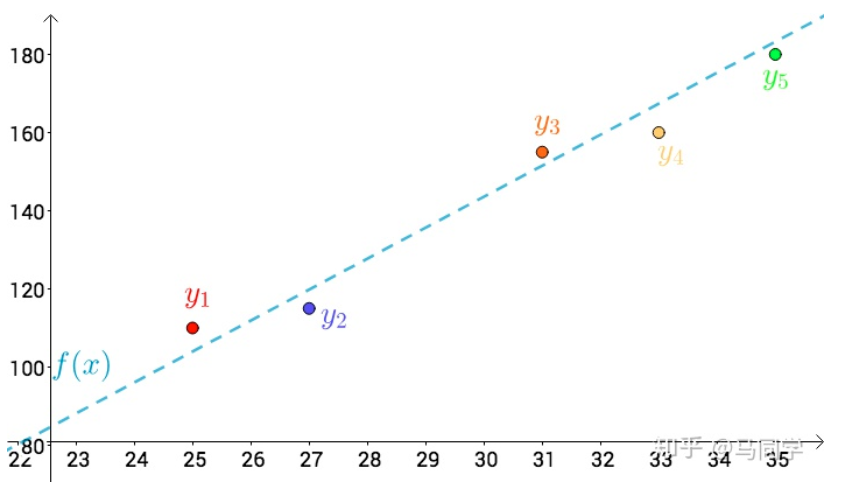
可以假设这种线性关系为: \(\begin{equation}f(x)=a x+b\end{equation}\) 通过最小二乘法的思想:
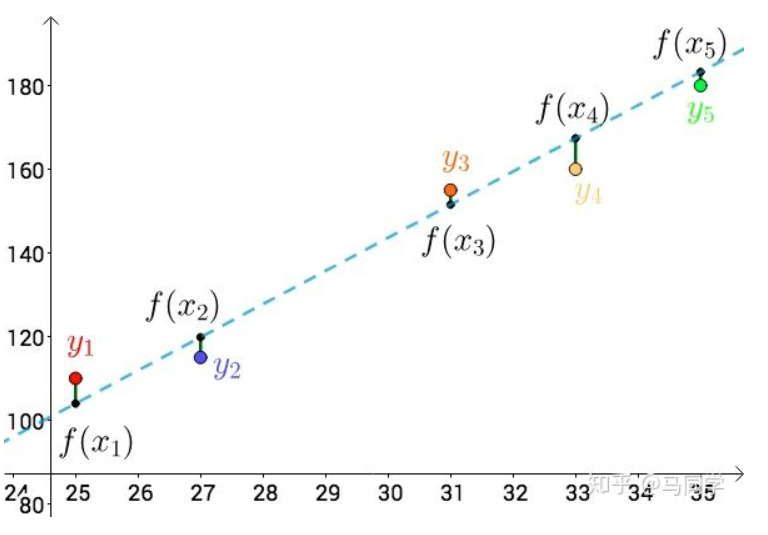
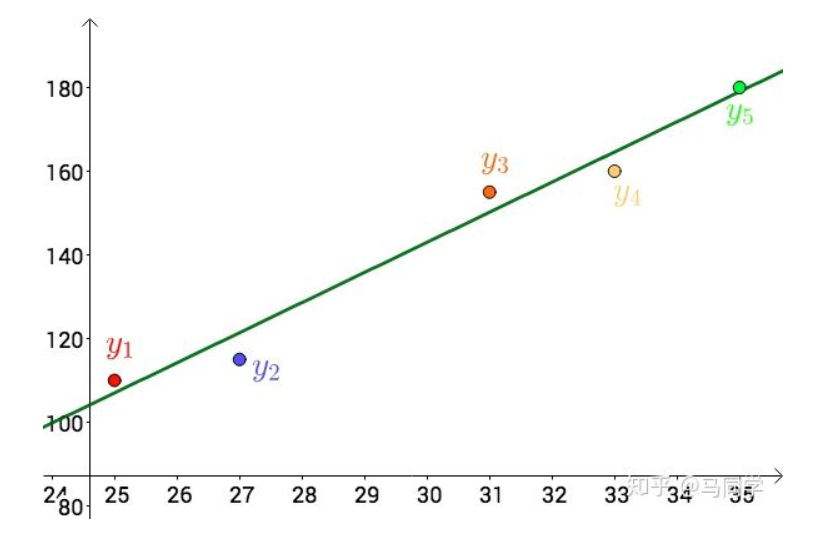
上图的 $i, x, y$ 分别为:
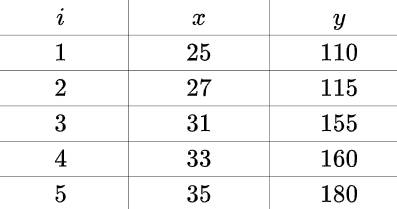
总误差的平方为:
\[\begin{equation}S_{\epsilon^{2}}=\sum\left(f\left(x_{i}\right)-y_{i}\right)^{2}=\sum\left(a x_{i}+b-y_{i}\right)^{2}\end{equation}\]不同的 $a, b$ 会导致不同的 \(S_{\epsilon^{2}}\),根据多元微积分的知识,当:
\[\begin{equation}\left\{\begin{array}{l} \frac{\partial}{\partial a} S_{\epsilon^{2}}=2 \sum\left(a x_{i}+b-y_{i}\right) x_{i}=0 \\ \frac{\partial}{\partial b} S_{\epsilon^{2}}=2 \sum\left(a x_{i}+b-y_{i}\right)=0 \end{array}\right.\end{equation}\]这个时候 \(S_{\epsilon^{2}}\) 取最小值。
对于 $a,b$ 而言,上述方程组为线性方程组,用之前的数据解出来:
\[\begin{equation}\left\{\begin{array}{l} a \approx 7.2 \\ b \approx-73 \end{array}\right.\end{equation}\]也就是这根直线:
其实,还可以假设:
\[\begin{equation}f(x)=a x^{2}+b x+c\end{equation}\]在这个假设下,可以根据最小二乘法,算出 $a,b,c$ ,得到下面这根红色的二次曲线:
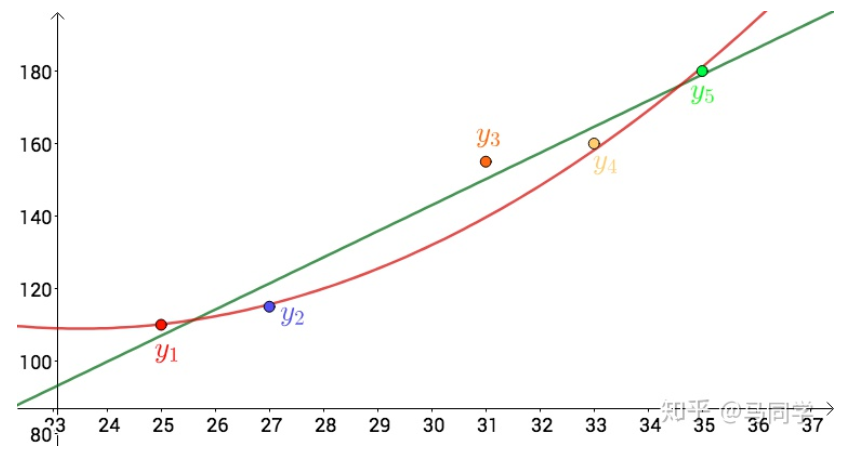
同一组数据,选择不同的 $f(x)$ ,通过最小二乘法可以得到不一样的拟合曲线
不同的数据,更可以选择不同的 $f(x)$ ,通过最小二乘法可以得到不一样的拟合曲线:
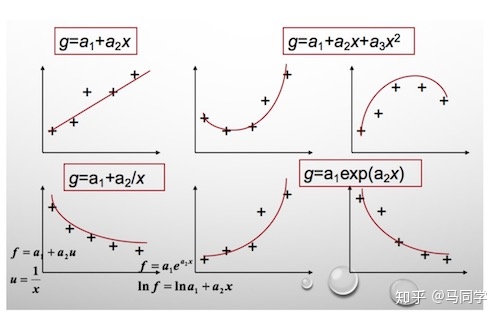
$f(x)$ 也不能选择任意的函数,还是有一些讲究的.
最小二乘法的矩阵法解法
比如我们有 个只有一个特征的样本 \(\left(x_{i}, y_{i}\right)(i=1,2,3 \ldots, m)\)
样本采用一般的 为
次的多项式拟合,
\(h_{\theta}(x)=\theta_{0}+\theta_{1} x+\theta_{2} x^{2}+\ldots \theta_{n} x^{n}, \theta\left(\theta_{0}, \theta_{1}, \theta_{2}, \ldots, \theta_{n}\right)\) 为参数
最小二乘法就是要找到一组 \(\theta\left(\theta_{0}, \theta_{1}, \theta_{2}, \ldots, \theta_{n}\right)\) 使得 \(\sum_{i=1}^{n}\left(h_{\theta}\left(x_{i}\right)-y_{i}\right)^{2}\) (残差平方和) 最小,即,求 \(\min \sum_{i=1}^{n}\left(h_{\theta}\left(x_{i}\right)-y_{i}\right)^{2}\)
最小二乘法的代数法解法就是对 求偏导数,令偏导数为 0,再解方程组,得到
。矩阵法比代数法要简洁,下面主要讲解下矩阵法解法,这里用多元线性回归例子来描:
假设函数
\[\begin{equation}h_{\theta}\left(x_{1}, x_{2}, \ldots x_{n}\right)=\theta_{0}+\theta_{1} x_{1}+\ldots+\theta_{n} x_{n}\end{equation}\]的矩阵表达方式为:
\[\begin{equation}h_{\theta}(\mathbf{x})=\mathbf{X} \theta\end{equation}\]其中, 假设函数 为
的向量,
为
的向量,里面有
个代数法的模型参数。
为
维的矩阵。
代表样本的个数,
代表样本的特征数。
损失函数定义为:
\[\begin{equation}J(\theta)=\frac{1}{2}(\mathbf{X} \theta-\mathbf{Y})^{T}(\mathbf{X} \theta-\mathbf{Y})\end{equation}\]其中 是样本的输出向量,维度为
。
在这主要是为了求导后系数为1,方便计算。
根据最小二乘法的原理,我们要对这个损失函数对 向量求导取0。结果如下式:
对上述求导等式整理后可得:
\[\begin{equation}\theta=\left(\mathbf{X}^{T} \mathbf{X}\right)^{-1} \mathbf{X}^{T} \mathbf{Y}\end{equation}\]最小二乘法与正态分布
我们对勒让德的猜测,即最小二乘法,仍然抱有怀疑,万一这个猜测是错误的怎么办?
数学王子高斯(1777-1855)也像我们一样心存怀疑。
高斯换了一个思考框架,通过概率统计那一套来思考。
让我们回到最初测量线段长度的问题。高斯想,通过测量得到了这些值:

每次的测量值 $x_i$ 都和线段长度的真值 $x$ 之间存在一个误差: \(\begin{equation}\epsilon_{i}=x-x_{i}\end{equation}\) 这些误差最终会形成一个概率分布,只是现在不知道误差的概率分布是什么。假设概率密度函数为: \(\begin{equation}p(\epsilon)\end{equation}\)
再假设一个联合概率,这样方便把所有的测量数据利用起来:
\[\begin{equation}\begin{aligned} L(x) &=p\left(\epsilon_{1}\right) p\left(\epsilon_{2}\right) \cdots p\left(\epsilon_{5}\right) \\ &=p\left(x-x_{i}\right) p\left(x-x_{2}\right) \cdots p\left(x-x_{5}\right) \end{aligned}\end{equation}\]把 $x$ 作为变量的时候,上面就是似然函数了
$L(x)$的图像可能是这样的(随便画的):
根据极大似然估计的思想,联合概率最大的最应该出现(既然都出现了,而我又不是“天选之子”,那么自然不会是发生了小概率事件), 也就是应该取到下面这点:
当下面这个式子成立时,取得最大值:
\[\begin{equation}\frac{d}{d x} L(x)=0\end{equation}\]然后高斯想,最小二乘法给出的答案是:
\[\begin{equation}x=\bar{x}=\frac{x_{1}+x_{2}+x_{3}+x_{4}+x_{5}}{5}\end{equation}\]如果最小二乘法是对的,那么 $x=\bar{x}$ 时应该取得最大值,即:
\[\begin{equation}\left.\frac{d}{d x} L(x)\right|_{x=\bar{x}}=0\end{equation}\]好,现在可以来解这个微分方程了。最终得到:
\[\begin{equation}p(\epsilon)=\frac{1}{\sigma \sqrt{2 \pi}} e^{-\frac{\epsilon^{2}}{2 \sigma^{2}}}\end{equation}\]这是什么?这就是正态分布啊。
并且这还是一个充要条件:
\[\begin{equation}x=\bar{x} \Longleftrightarrow p(\epsilon)=\frac{1}{\sigma \sqrt{2 \pi}} e^{-\frac{\epsilon^{2}}{2 \sigma^{2}}}\end{equation}\]也就是说,如果误差的分布是正态分布,那么最小二乘法得到的就是最有可能的值。
那么误差的分布是正态分布吗?
如果误差是由于随机的、无数的、独立的、多个因素造成的,比如之前提到的:
- 不同厂家的尺子的生产精度不同
- 尺子材质不同,热胀冷缩不一样
- 测量的时候心情起伏不定
- ………
虽然勒让德提出了最小二乘法(高斯说他最早提出最小二乘法,只是没有发表),但是高斯的努力,才真正奠定了最小二乘法的重要地位。
案例python实现
目标函数
\[y=\sin 2 \pi x\]导入库函数
import numpy as np
import pandas as pd
from scipy.optimize import leastsq
import matplotlib.pyplot as plt
%matplotlib inline
%load_ext lab_black
定义目标函数,多项式函数,残差函数
# 目标函数
def real_func(x):
return np.sin(2 * np.pi * x)
# 多项式
def fit_func(p, x):
f = np.poly1d(p)
return f(x)
# 残差
def residuals_func(p, x, y):
ret = fit_func(p, x) - y
return ret
添加随机误差
# 十个点
x = np.linspace(0,1,10)
x_points = np.linspace(0,1,1000)
# 加上正态分布噪音的目标函数的值
y_ = real_func(x)
y = [np.random.normal(0,0.1)+y1 for y1 in y_]
拟合多项式并可视化
def fitting(M=0):
"""
M : 多项式的次数
"""
# 随机初始化多项式的参数
p_init = np.random.rand(M + 1)
# 最小二乘法
p_lsq = leastsq(residuals_func, p_init, args=(x, y))
print(f"Fitting Parameters{p_init[0]}")
# 可视化
plt.plot(x_points, real_func(x_points), label="real")
plt.plot(x_points, fit_func(p_lsq[0], x_points), label="fitted curve")
plt.plot(x, y, "bo", label="noise")
plt.legend()
plt.savefig(f"{M}.png", dpi=300)
return p_lsq
-
0 次拟合
p_lsq_0 = fitting(M=0)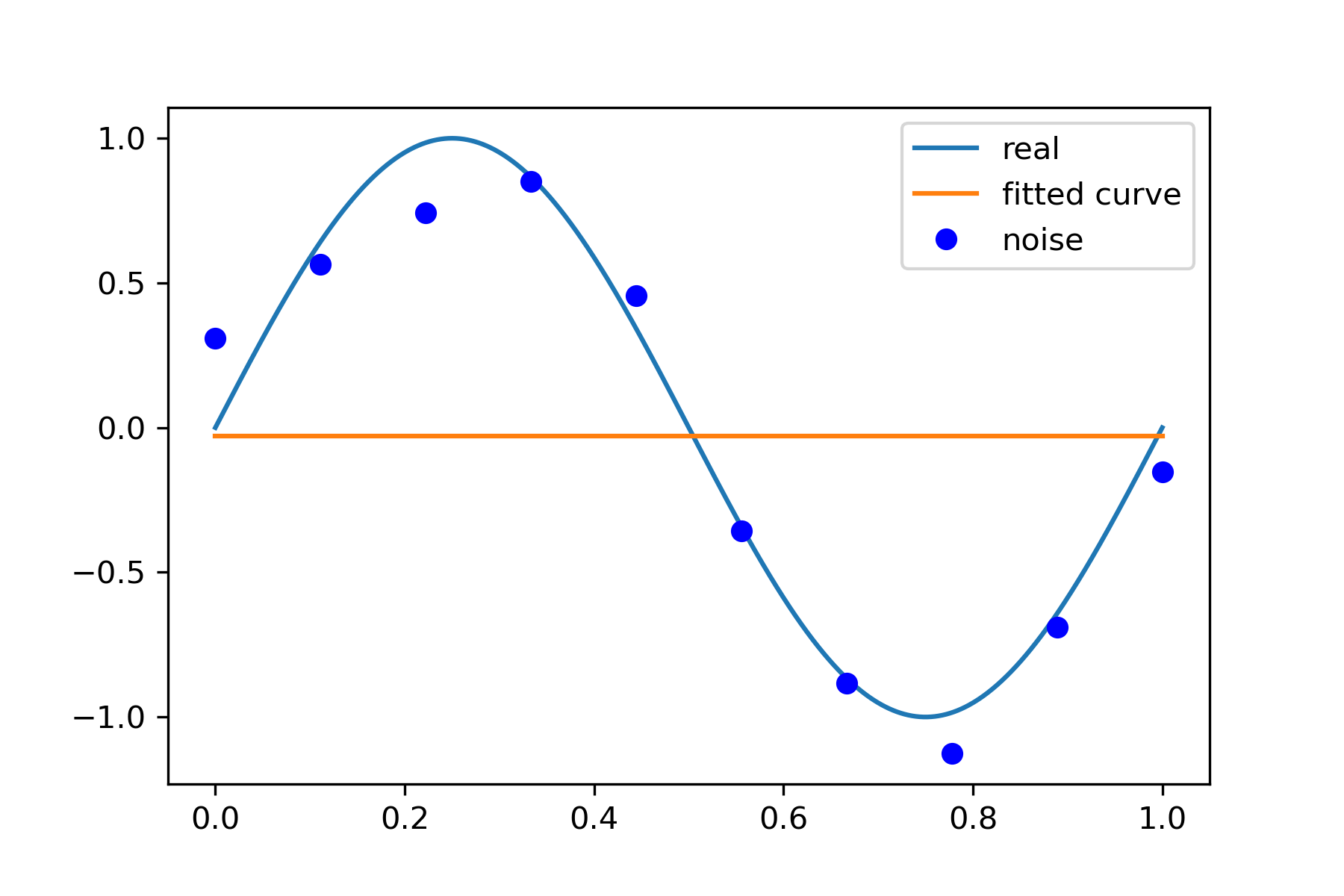
-
1 次拟合
# M=1 p_lsq_1 = fitting(M=1)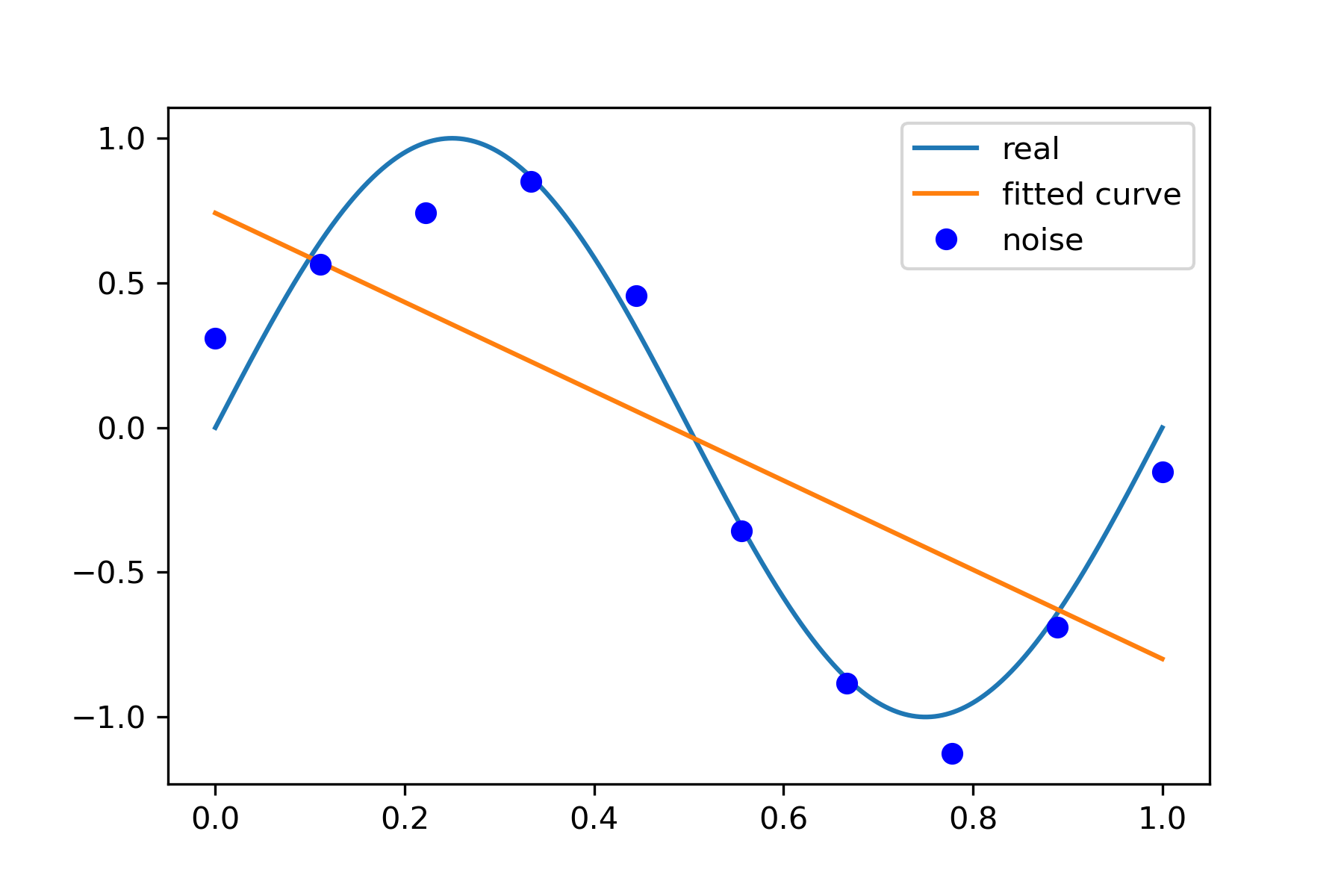
-
3 次拟合
# M=3 p_lsq_3 = fitting(M=3)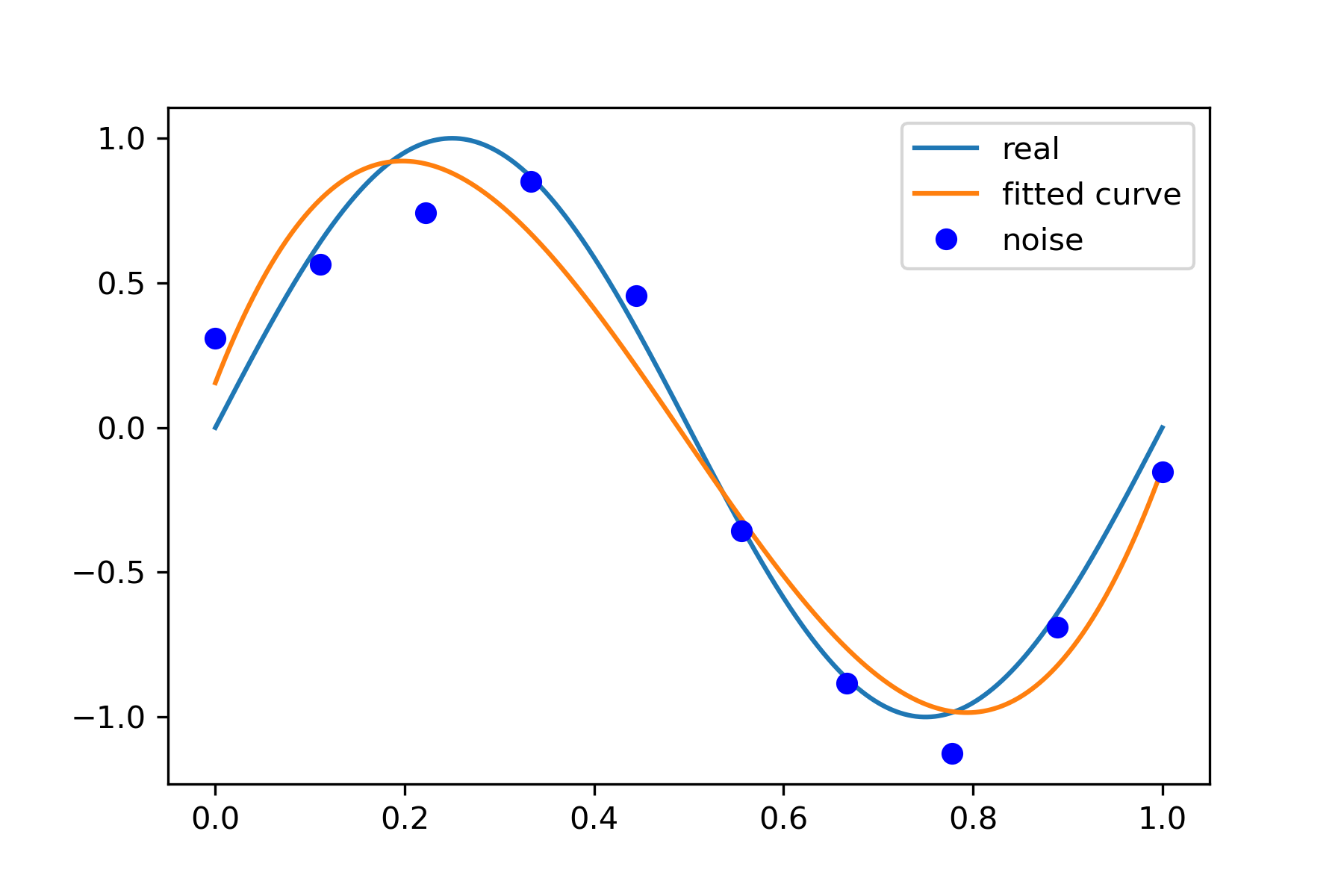
-
9 次拟合
# M=9 p_lsq_9 = fitting(M=9)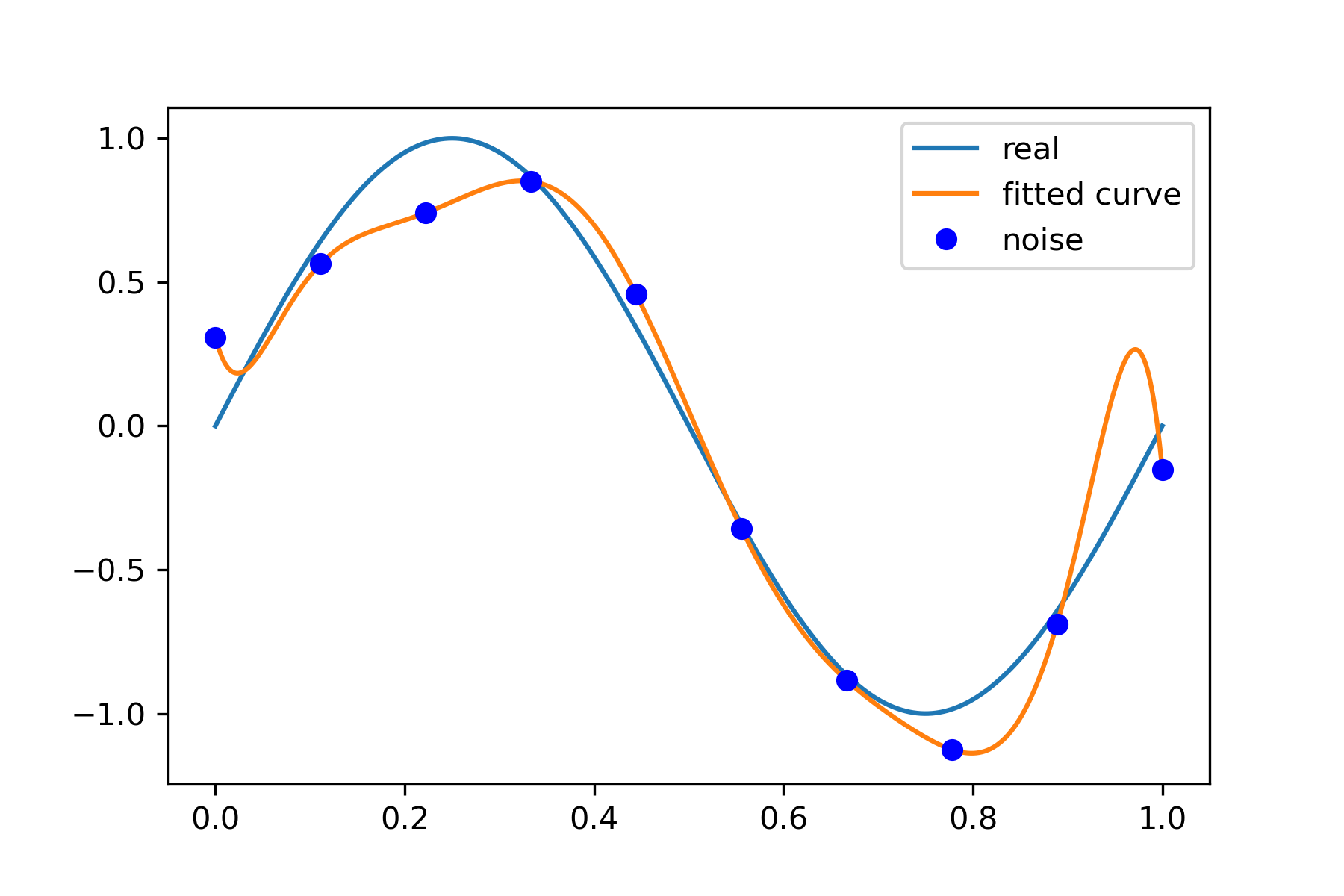
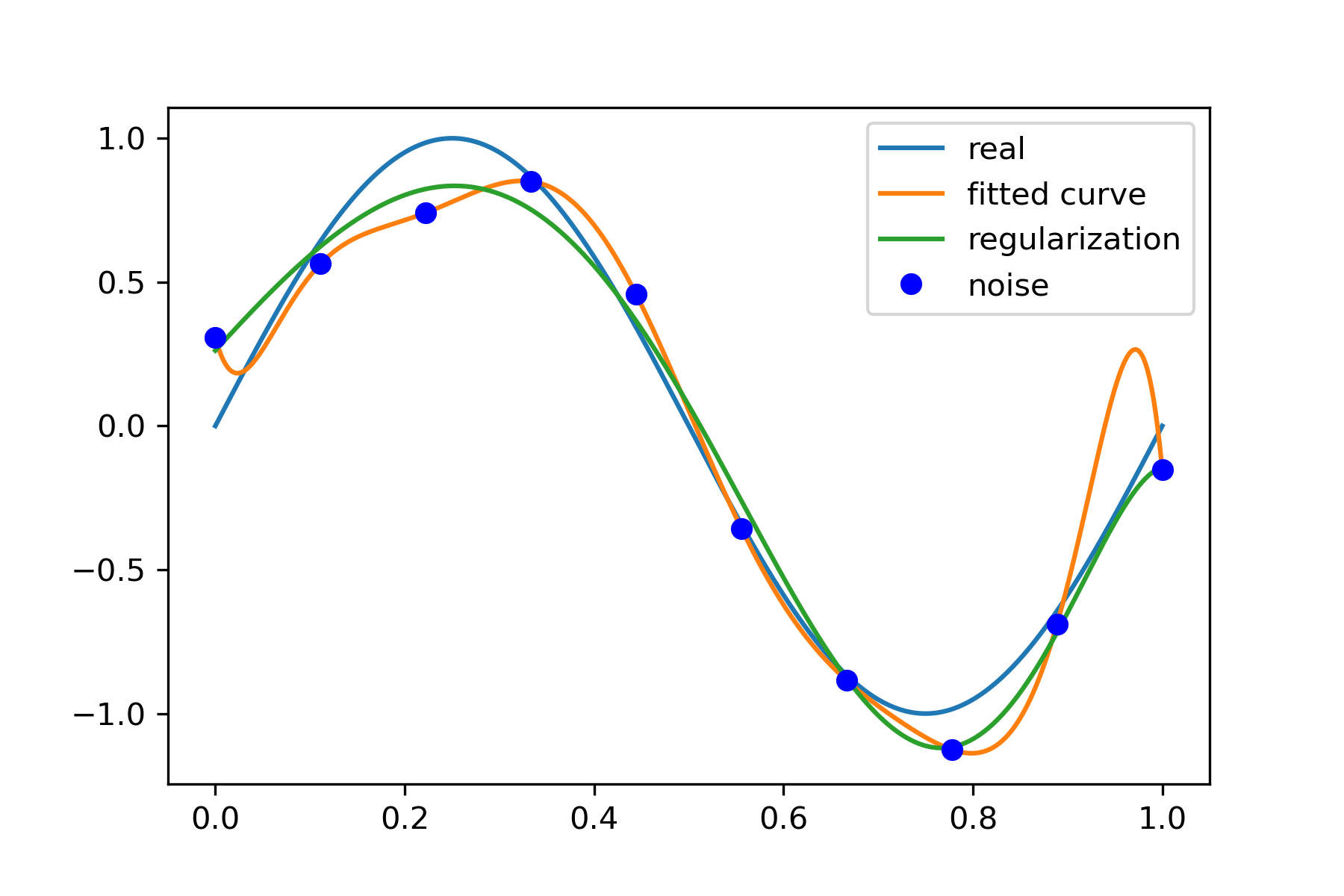
当M=9时,多项式曲线通过了每个数据点,但是造成了过拟合
正则化
结果显示过拟合, 引入正则化项(regularizer),降低过拟合
\[\begin{equation}Q(x)=\sum_{i=1}^{n}\left(h\left(x_{i}\right)-y_{i}\right)^{2}+\lambda\|w\|^{2}\end{equation}\]回归问题中,损失函数是平方损失,正则化可以是参数向量的L2范数,也可以是L1范数。
L1: regularization*abs(p)
L2: 0.5 * regularization * np.square(p)
regularization = 0.0001
def residuals_func_regularization(p, x, y):
ret = fit_func(p, x) - y
ret = np.append(ret, np.sqrt(0.5 * regularization * np.square(p)))
return ret
# 最小二乘法,加正则化项
p_init = np.random.rand(9 + 1)
p_lsq_regularization = leastsq(residuals_func_regularization, p_init, args=(x, y))
plt.plot(x_points, real_func(x_points), label="real")
plt.plot(x_points, fit_func(p_lsq_9[0], x_points), label="fitted curve")
plt.plot(x_points, fit_func(p_lsq_regularization[0], x_points), label="regularization")
plt.plot(x, y, "bo", label="noise")
plt.legend()