牛顿法与拟牛顿法
牛顿法是数值优化算法中的大家族,她和她的改进型在很多实际问题中得到了应用。在机器学习中,牛顿法是和梯度下降法地位相当的的主要优化算法。
牛顿法不仅可以用来求解函数的极值问题,还可以用来求解方程的根,二者在本质上是一个问题,因为求解函数极值的思路是寻找导数为 0 的点,这就是求解方程。在本文中,我们介绍的是求解函数极值的牛顿法。
和梯度下降法一样,牛顿法也是寻找导数为 0 的点,同样是一种迭代法。核心思想是在某点处用二次函数来近似目标函数,得到导数为 0 的方程,求解该方程,得到下一个迭代点。因为是用二次函数近似,因此可能会有误差,需要反复这样迭代,直到到达导数为 0 的点处。下面我们开始具体的推导,先考虑一元函数的情况,然后推广到多元函数。
一元函数的情况
为了能让大家更好的理解推导过程的原理,首先考虑一元函数的情况。根据一元函数的泰勒展开公式,我们对目标函数在 x0 点处做泰勒展开,有:
f(x)=f(x0)+f′(x0)(x−x0)+21f′′(x0)(x−x0)2+…+n!1f(n)(x0)(x−x0)n…
如果忽略 2 次以上的项,则有:
f(x)=f(x0)+f′(x0)(x−x0)+21f′′(x0)(x−x0)2
现在我们在 x0 点处,要以它为基础,找到导数为 0 的点,即导数为 0。对上面等式两边同时求导,并令导数为 0,可以得到下面的方程:
f′(x)=f′(x0)+f′′(x0)(x−x0)=0
可以解得:
x=x0−f′′(x0)f′(x0)
这样我们就得到了下一点的位置,从而走到 x1。接下来重复这个过程,直到到达导数为 0 的点,由此得到牛顿法的迭代公式:
xt+1=xt−f′′(xt)f′(xt)
给定初始迭代点 x0 ,反复用上面的公式进行迭代,直到达到导数为 0 的点或者达到最大迭代次数。
多元函数的情况
无约束最优化问题
x∈Rnminf(x)
其中 x∗ 为目标函数的极小点。
设 f(x) 具有二阶连续偏导数,若第 k 次迭代值为 xk ,则可将 f(x) 在 xk 附近进行二阶泰勒展开
f(x)=f(x(k))+gkT(x−x(k))+21(x−x(k))TH(x(k))(x−x(x))
其中 gk=g(x(k))=∇f(x(k)) 是 f(x) 的梯度向量在点 xk 的值,H(x(k)) 是 f(x) 得黑塞矩阵:
H(x)=[∂xi∂xj∂2f]n×n
在点 xk 的值。
函数 f(x) 有极值的必要条件是在极值点处一阶导数为0,即梯度向量为0。特别的当 H(x(k)) 是正定矩阵时,函数 的 f(x) 极值为极小值。
牛顿法利用极小点得必要条件:
∇f(x)=0
每次迭代从点 xk 开始,求目标函数得极小点,作为第 k+1 次迭代值 xk+1,具体地,假设 xk+1 满足:
∇f(x(k+1))=0
由 f(x)=f(x(k))+gkT(x−x(k))+21(x−x(k))TH(x(k))(x−x(x)) ,根据二阶泰勒展开,对 ∇f(x) 在 xk 进行展开得(也可以对上述泰勒公式再进行求导)得:
∇f(x)=gk+Hk(x−x(k))
其中 Hk=H(x(k)) ,这样, ∇f(x(k+1))=0 成为:
gk+Hk(x(k+1)−x(k))=0
因此,
x(k+1)=x(k)−Hk−1gk
或者:
x(k+1)=x(k)+pk
其中,
Hkpk=−gk
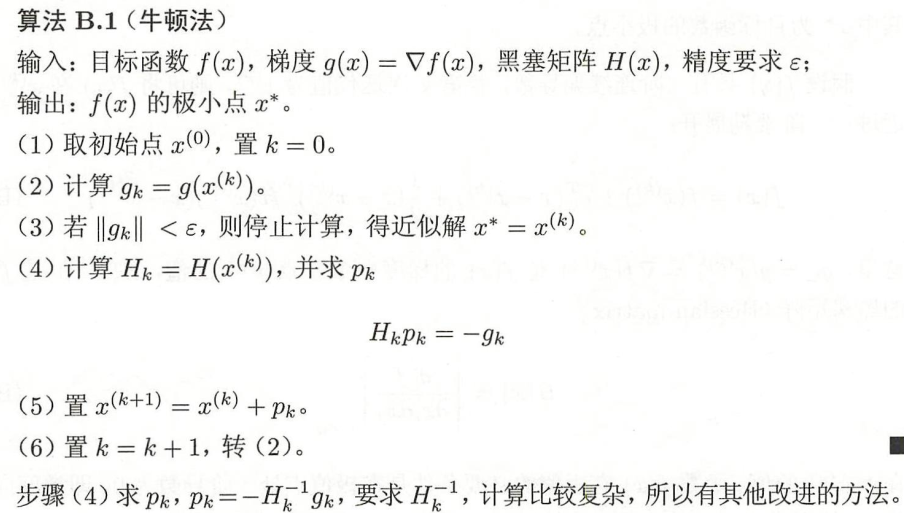
式 x(k+1)=x(k)−Hk−1gk 作为迭代公式得算法就是牛顿法
算法步骤
.jpg)
牛顿法与梯度下降法
梯度下降法和牛顿法相比,两者都是迭代求解,不过梯度下降法是梯度求解,而牛顿法是用二阶的海森矩阵的逆矩阵求解。相对而言,使用牛顿法收敛更快(迭代更少次数)。但是每次迭代的时间比梯度下降法长。
梯度下降法:x(k+1)=x(k)−λ∇f(xk)
牛顿法:x(k+1)=x(k)−λ(H(k))−1∇f(xk)
梯度下降法中,每一次 x 增加的方向一定是梯度相反的方向 −ϵk∇k。增加的幅度由 ϵk 决定,若跨度过大容易引发震荡。
而牛顿法中,每一次 x 增加的方向是梯度增速最大的反方向 −Hk−1∇k(它通常情况下与梯度不共线)。增加的幅度已经包含在 Hk−1 中(也可以乘以学习率作为幅度的系数)。
对于不带约束条件的问题,我们可以将x的初始值设定为任意值,最简单的,可以设置为全0的向量。迭代终止的判定规则和梯度下降法相同,是检查梯度是否接近于0。
面临的问题
牛顿法并不能保证每一步迭代时函数值下降,也不保证一定收敛。为此,提出了一些补救措施,其中的一种是直线搜索(line search)技术,即搜索最优步长。具体做法是让 γ 取一些典型的离散值,如0.0001,0.001,0.01等,比较取哪个值时函数值下降最快,作为最优步长。
和梯度下降法相比牛顿法有更快的收敛速度,但每一步迭代的成本也更高。在每次迭代中,除了要计算梯度向量还要计算Hessian矩阵,并求解Hessian矩阵的逆矩阵。
牛顿法面临的另外一个问题是Hessian矩阵可能不可逆,从而导致这种方法失效。此外,求解Hessian矩阵的逆矩阵或者求解线性方程组计算量大,需要耗费大量的时间。为此,提出了拟牛顿法这种改进方案
除此之外,牛顿法在每次迭代时序列xi可能不会收敛到一个最优解,它甚至不能保证函数值会按照这个序列递减。解决第一个问题可以通过调整牛顿方向的步长来实现,目前常用的方法有两种:直线搜索和可信区域法。
拟牛顿法
牛顿法在每次迭代时需要计算出Hessian矩阵,然后求解一个以该矩阵为系数矩阵的线性方程组,这非常耗时,另外Hessian矩阵可能不可逆。为此提出了一些改进的方法,典型的代表是拟牛顿法(Quasi-Newton)。
在牛顿法的迭代中,需要计算海森矩阵的逆矩阵 ![[公式]](https://www.zhihu.com/equation?tex=H%5E%7B-1%7D) ,这一计算比较复杂,考虑用一个
,这一计算比较复杂,考虑用一个 ![[公式]](https://www.zhihu.com/equation?tex=n) 阶矩阵
阶矩阵 ![[公式]](https://www.zhihu.com/equation?tex=G_k%3DG%28x%5E%7B%28k%29%7D%29) 来近似代替
来近似代替 ![[公式]](https://www.zhihu.com/equation?tex=H_k%5E%7B-1%7D%3DH%5E%7B-1%7D%28x%5E%7B%28k%29%7D%29) 。这就是拟牛顿法的基本想法。
。这就是拟牛顿法的基本想法。
先看下牛顿法迭代中海森矩阵 Hk 满足的条件。首先 Hk满足以下关系:
在公式 ∇f(x)=gk+Hk(x−x(k)) 中,取 x=x(k+1) 既得:
gk+1−gk=Hk(x(k+1)−x(k))
记 yk=gk+1−gk,δk=x(k+1)−x(k) ,则
yk=Hkδk
或
Hk−1yk=δk
上式称为拟牛顿条件
其次,如果 Hk 是正定的( Hk−1也是正定的),那么保证牛顿法的搜索方向 pk 是下降方向。这是因为搜索方向是 pk=−Hk−1gk ,由 x(k+1)=x(k)−Hk−1gk 有:
x=x(k)+λpk=x(k)−λHk−1gk
所以 f(x) 在 xk 得泰勒展开式 :
f(x)=f(x(k))+gkT(x−x(k))+21(x−x(k))TH(x(k))(x−x(k))
可以近似写成:
f(x)=f(x(k))−λgkTHk−1gk
因 Hk−1 正定,故有 gkTHk−1gk>0 , 。当 ![[公式]](https://www.zhihu.com/equation?tex=%5Clambda) 为一个充分小的正数时,总有 f(x)<f(x(k)) ,也就是说
为一个充分小的正数时,总有 f(x)<f(x(k)) ,也就是说 ![[公式]](https://www.zhihu.com/equation?tex=p_%7Bk%7D) 是下降方向。
是下降方向。
因此拟牛顿法将 Gk 作为 Hk−1 近似。要求 满 Gk 足同样的条件。首先,每次迭代矩阵 Gk 是正定的。同时, Gk 满足下面的拟牛顿条件:
Gk+1yk=δk
按照拟牛顿条件,在每次迭代中可以选择更新矩阵 Gk+1
Gk+1=Gk+ΔGk
根据此条件,构造出了多种拟牛顿法,典型的有 DFP 算法、BFGS算法、L-BFGS算法等,
BFGS algorithm
BFGS(Broyden-Fletcher-Goldfarb-Shanno)
BFGS 算法是最流行得拟牛顿算法。
可以考虑用 Gk 逼近海森矩阵得逆矩阵 H−1,也可以考虑用 Bk 逼近海森矩阵。
这时,相应得拟牛顿条件是
Bk+1δk=yk
可以用到同样得方法得到另一个迭代公式。首先令
Bk+1=Bk+Pk+QkBk+1δk=Bkδk+Pkδk+Qkδk
考虑使 Pk 和 Qk 满足:
Pkδk=ykQkδk=−Bkδk
找出适合条件得 Pk 和 Qk ,得到 BFGS 算法矩阵 Bk+1 得迭代公式:
Bk+1=Bk+ykTδkykykT−δkTBkδkBkδkδkTBk
可以证明,如果初始矩阵 B0 是正定的,则迭代过程中的每个矩阵 Bk 都是正定的。
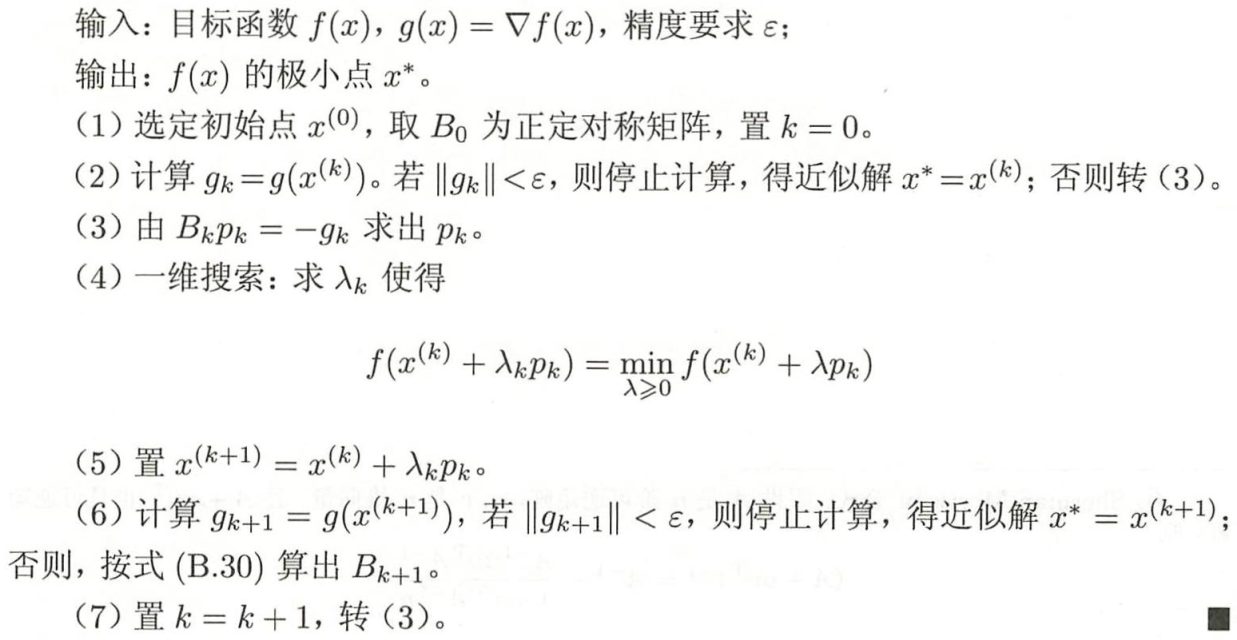
BFGS 算法流程
参考
.jpg)